






The OakSense H67V is a demo kit based on the MLX75027 ToF sensor and it can be applied as a camera or a temperature detector. With high accuracy of detecting objects, the kit can be directly connected to a PC and programmed by C++ or Python. All data output through SDK which is available for Windows, Linux, Mac.
PRODUCT DETAILS
Feature
- Mounted sensor: MLX75027 Time-of-Flight sensor
- Full VGA resolution image acquisition: 0.3MP 640 x 480 px
- Long Measured Range: 0.5m ~ 4.0m
- High measurement Accuracy: more than 99%
- Display Frames Per Second: Maximum 30 FPS
- Field-of-view: H67° x V51°
- Multiply illumination: 4 x VCSEL @ 850nm
- Built-in sensor: Additional temperature sensor
- Data interface: Directly connect to PC through USB 3.1 Gen1 /Type C
- Operating Temperature:-10°C - 60°C
- Power Consumption:12V/ 1A (Peak) /0.5A(Average)
Description
The OakSense H67V is a demo kit based on the MLX75027 Time-of-Flight (ToF) sensor. The principle of the ToF sensor is emitting and receiving near-infrared light. Combined with it and based on traditional camera technology, the OakSense H67V is designed as a functional and high accurate detecting objects camera. And because of the characteristic of the MLX75027 sensor, the kit has an additional temperature sensor. Conveniently, the OakSense H67V kit can be directly connected to a PC for visualization and recoding of depth map data while allowing direct access to basic parameters.
The OakSense H67V acquires images in full VGA resolution which means it supports 640 x 480 pixels displayed on the screen. It supports at 30 FPS maximum and the field it can view is H67° x V51°. It can measure the distance from 0.5 meters up to 4.0 meters below 1% error. More specifically, between the distance a half meter and a whole meter, the accuracy is less than 1cm and between 1 and 4 meters, the accuracy will be under 1% error.
In a compact form, the OakSense H67V still has set up 4 Vertical-Cavity Surface-Emitting Lasers(VCSEL) to illuminate and emit near-infrared light as 850nm waves. Because the receiving end is the laser detector, it can be used in Machine Learning projects. And for convenience, it can be directly deployed by connecting to the host PC with the Type C USB 3.0 interface and output depth image, grayscale image, and point cloud picture through the software development kit(SDK). The SDK is available for Windows, Linux, Mac and you can program it in C++ or Python.
Application
- Robot obstacle avoidance
- Volume measurement
- Object recognition
- Environment scanning
- 3D re-modeling
- Object recognition
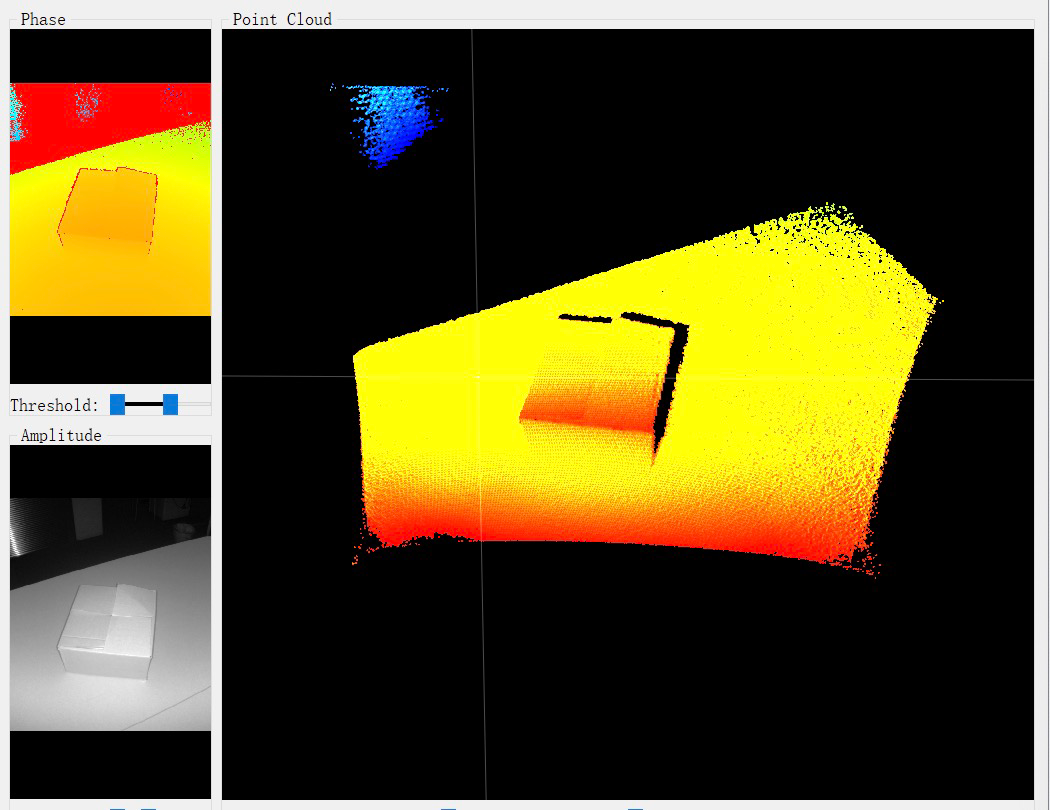
Example Results
Depth Image / IR Image / PointCloud View

Part List
| OakSense H67V | x1 |
|---|---|
| TypeC 3.1 cable | x1 |
| Power supply | 15V 2A |
ECCN/HTS
| HSCODE | 9031900090 |